Generalized Centrifugal Force Model
Introduction to Generalized Centrifugal Force Model
The Generalized Centrifugal Force Model [1] is a force-based model that defines the movement of pedestrians through the combination of small-range forces. This model represents the spatial requirement of pedestrians, including their body asymmetry, in an elliptical shape with two axes dependent on speed. The semi-axis representing the dynamic space requirement in the direction of motion increases proportionally as speed increases. Conversely, the semi-axis along the shoulder direction decreases with higher velocities.
Basic Principles of Generalized Centrifugal Force Model
GCFM belongs to the class of force-based pedestrian models, which view pedestrian movement as the result of forces acting on an individual at any given moment. These so-called acceleration-based models calculate the acceleration of agents by superposing the forces acting on them.
The movement of pedestrians is influenced by three main forces in the Generalized Centrifugal Force Model: the destination driving force, the obstacle repulsive force, and the repulsive force between pedestrians. The destination driving force propels individuals towards their intended destinations, taking into account factors such as distance and desired walking speed. On the other hand, the obstacle-repulsive force pushes pedestrians away from obstacles to maintain a safe distance from walls or other objects. Lastly, the repulsive force between pedestrians prevents collisions among them [1].
The model considers both the distance between pedestrians and their relative velocities. Using an elliptical volume exclusion instead of a circular one has several advantages. Circular symmetry is inconsistent with the asymmetric space requirements of pedestrians in terms of their motion direction and transverse to it. As a force-based model, GCFM describes the temporal changes in pedestrian movement through the combination of short-range forces acting on them simultaneously.
Mathematical description
Elliptical volume exclusion of agents
The Generalized Centrifugal Force Model incorporates an elliptical volume exclusion of pedestrians. This means that pedestrians are represented as elliptical disks with two semi-axes, which depend on their speed. The semi-axis representing the dynamic space requirement in the direction of motion ($a$) increases proportionally as speed increases, while the semi-axis along the shoulder direction decreases with higher speed values ($b$).
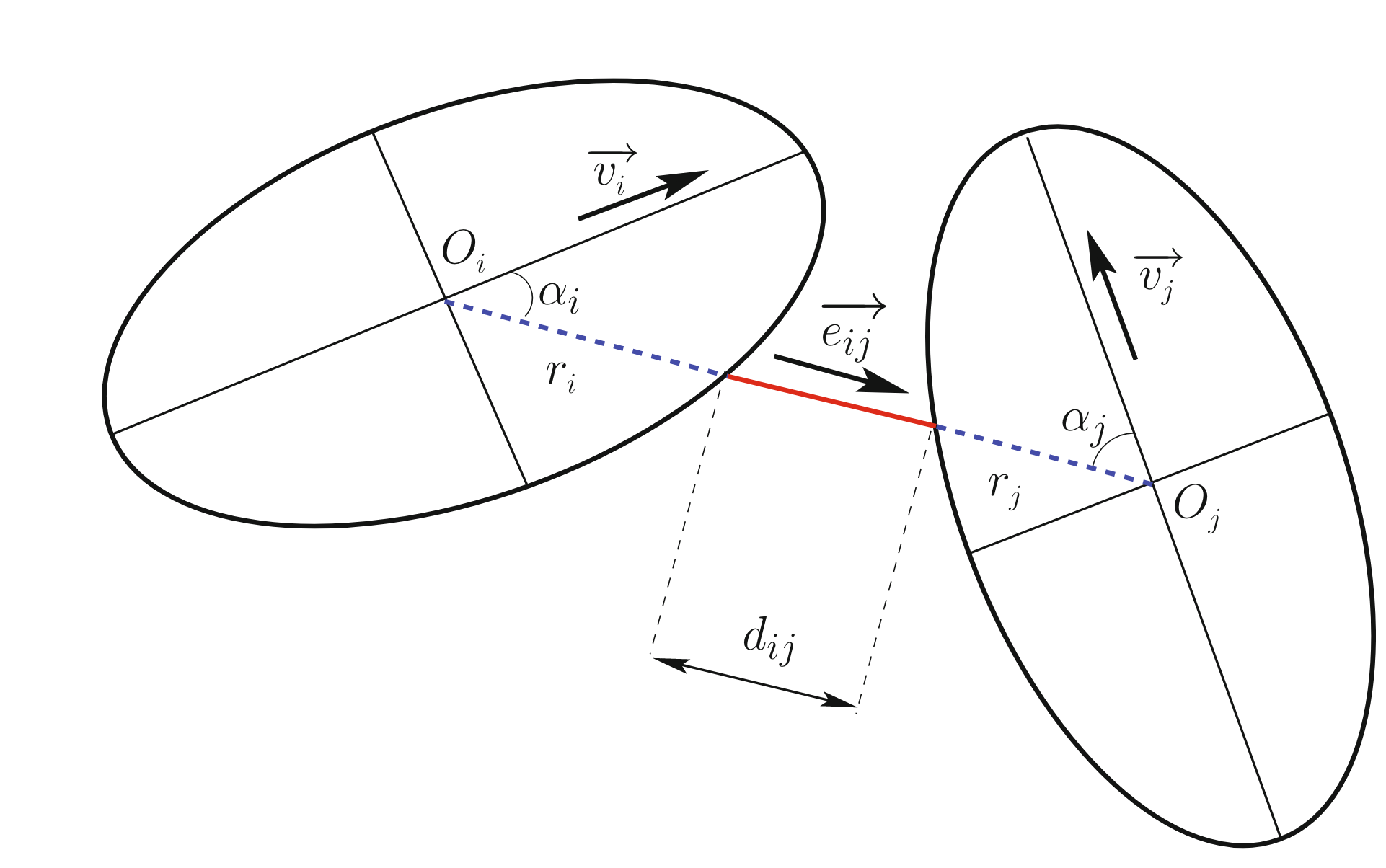
The distance between the borders of the ellipses along a line connecting their centers.
The mathematical description of the elliptical volume exclusion in GCFM is as follows
$$a=a_{\min }+\tau_a v_i$$
and
$$b=b_{\max }-\left(b_{\max }-b_{\min }\right) \frac{v_i}{v_i^0},$$
where $v_i$ is the speed and $v_i^0$ the desired speed of agent $i$.
Equation of motion
The behavior of agents in motion is influenced by the presence of others, causing them to deviate from a straight path. Drawing parallels to Newtonian mechanics, such deviations or accelerations are attributed to a force. Hence, the equation of motion can be written as:
$$\vec{\ddot x}_i=\overrightarrow{F_i^{\mathrm{drv}}}+\sum_{j \in \mathcal{N}_{i}} \overrightarrow{F_{i j}^{\mathrm{rep}}}+\sum_{w \in \mathcal{W}_{i}} \overrightarrow{F_{i w}^{\mathrm{rep}}}.$$
Driving force
The driving force in the Generalized Centrifugal Force Model is defined as the force that propels pedestrians towards their intended destinations:
$$\vec{F}_i^{\mathrm{drv}}=m_i \frac{\overrightarrow{v_i^0}-\overrightarrow{v_i}}{\tau}.$$
Pedestrian-pedestrian repulsive force
The pedestrian-pedestrian repulsive force in the Generalized Centrifugal Force Model is defined as the force that prevents collisions between pedestrians. By considering the repulsive force between pedestrians, the Generalized Centrifugal Force Model ensures that individuals maintain a safe distance from each other.
$${\overrightarrow{F_{i,j}}}_{\text {rep }}=-m_i k_{i j} \frac{\left(\eta\left|\overrightarrow{v_i^0}\right|+v_{i j}\right)^2}{d_{i j}} \overrightarrow{e_{i j}},$$
with the relative speed
$$v_{i j}=\frac{1}{2}\left[\left(\overrightarrow{v_i}-\overrightarrow{v_j}\right) \cdot \overrightarrow{e_{i j}}+\left|\left(\overrightarrow{v_i}-\overrightarrow{v_j}\right) \cdot \overrightarrow{e_{i j}}\right|\right],$$
and a reduction of the influence range to $180^\circ$ by:
$$k_{i j}=\frac{1}{2} \frac{\overrightarrow{v_i} \cdot \overrightarrow{e_{i j}}+\left|\overrightarrow{v_i} \cdot \overrightarrow{e_{i j}}\right|}{v_i}.$$
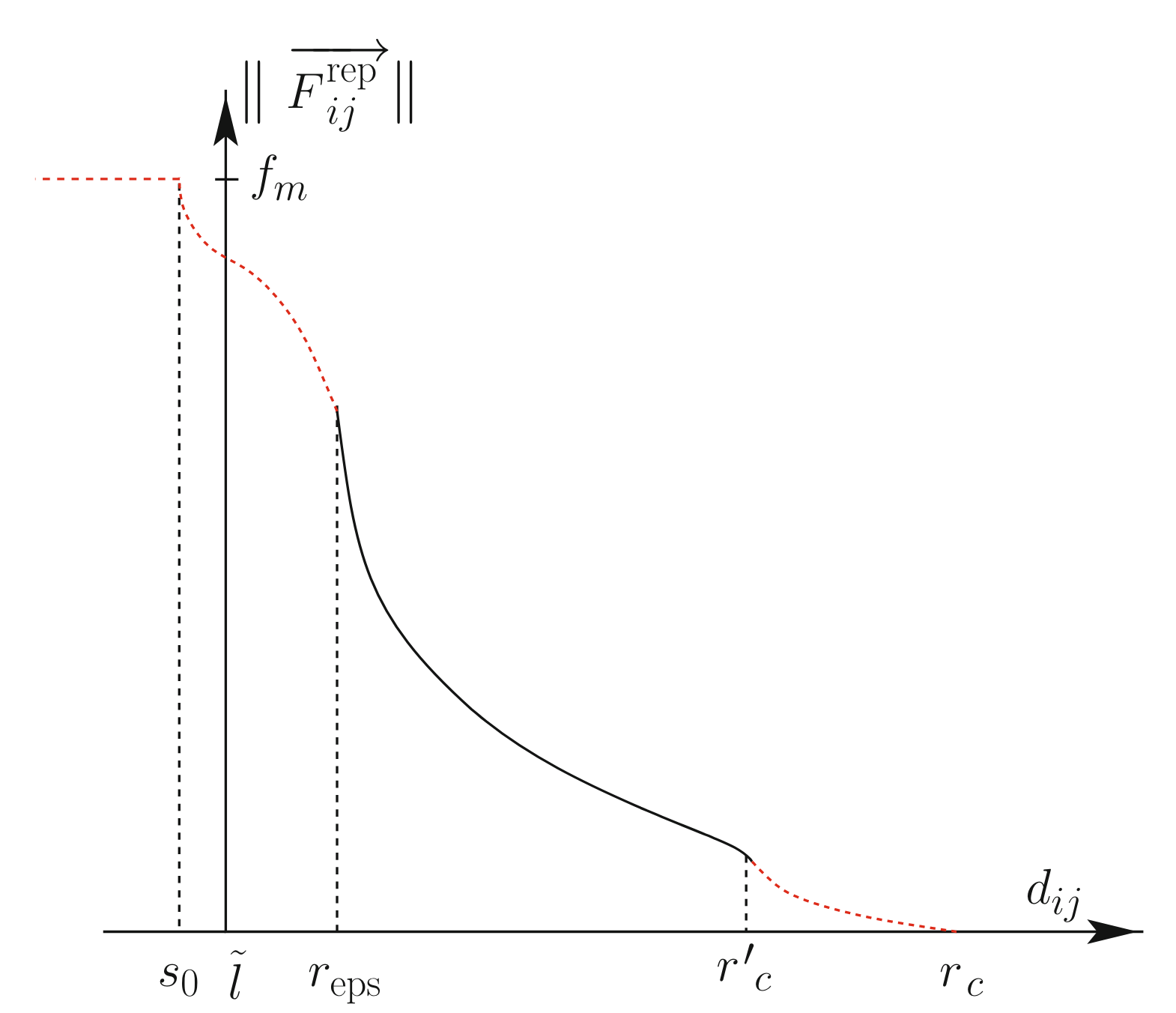
The interpolation of the repulsive force between pedestrians.
Pedestrian-wall repulsive force
In the Generalized Centrifugal Force Model, the repulsive force between pedestrians and walls represents the force that propels pedestrians away from walls and other fixed structures. For a pedestrian labeled as $i$, this repulsive force is nullified when $i$ moves parallel to the wall. However, while this force behavior is accurate, it results in minimal repulsion when the pedestrian’s trajectory is nearly aligned with the wall.
For this reason, we characterize in this model walls by three-point masses acting on pedestrians within a certain interaction range.
Each wall is modeled as three static point masses acting on pedestrians.
Limitations of the GCFM
As a force-based model, the GCFM suffers from several drawbacks typical for force-based models, namely the duality problem of overlapping and oscillations.
It is possible to reduce the amount of overlapping among agents, by increasing the strength of the repulsive forces. However, this leads inevitably to an increase of oscillations in the movements of agents, which in turn can only be mitigated by decreasing the strength of the repulsive forces. See [2] for a more in-depth analysis of this issue.
Challenges in Implementing GCFM
The computational cost of the GCFM is high, as it requires continuous calculations to determine the forces and interactions between pedestrians. This includes calculating distances between ellipses, such as the closest approach distance. Additionally, while the strength of repulsive force decreases with increasing distance between pedestrians, it currently has an infinite range, which is unrealistic for pedestrian interactions. To address this, we propose introducing a cutoff radius for the force to limit interactions only to adjacent pedestrians. However, implementing this cutoff radius requires a two-sided Hermite-interpolation of the repulsive force and further increases computational complexity. Furthermore, finding appropriate values for model parameters that are independent of neighborhood properties and reduce overlapping and oscillation is challenging.
References:
- [1] Chraibi, M., Seyfried, A., Schadschneider, A.
(2010). Generalized centrifugal-force model for pedestrian dynamics, Physical
Review E, 82, 4
https://link.aps.org/doi/10.1103/PhysRevE.82.046111 - [2] Chraibi, M., Schadschneider, A., Seyfried, A.
(2013). On Force-Based Modeling of Pedestrian Dynamics.
https://doi.org/10.1007/978-1-4614-8483-7_2